





- Descrição
- Links Úteis
Motor
Acionamento de motores DC
- Controle para motores DC de 4V até 18V
- Controla 2 motores com 1A cada, ou 1 motor com até 1,8A
- Proteção contra sobrecarga, curto-circuito e inversão de polaridade
Com o Nanoshield Motor, você pode controlar a velocidade e o sentido de rotação de motores DC. O módulo trabalha com tensão de 4V até 18V, e é possível controlar 2 motores independentes com 1A cada, ou 1 motor com até 1,8A. Seu uso é indicado para aplicações em robótica, ou qualquer outro projeto em que seja necessário controlar motores DC de baixa potência.
Além disso, há diversas possibilidades para você configurar o modo como os motores e o Arduino serão alimentados, simplificando a fiação e tornando o projeto mais flexível, como você verá abaixo.
O módulo também é protegido contra sobrecarga e ligações acidentais, como inversão de polaridade da fonte ou bateria, e curto-circuito nos motores.

Utilizando o Nanoshield Motor
Para utilizar o Nanoshield Motor, basta você escolher se quer controlar 1 ou 2 motores, e qual será o método utilizado para alimentar o sistema. Utilize as seções a seguir como guia.
Passo 1: Escolhendo entre 1 ou 2 motores
O Nanoshield Motor pode controlar 2 motores DC com até 1A de corrente em cada um, ou apenas um motor com corrente de 1,8A (o intervalo de tensão permitido é de 4 até 18V).
Ligação com 2 motores
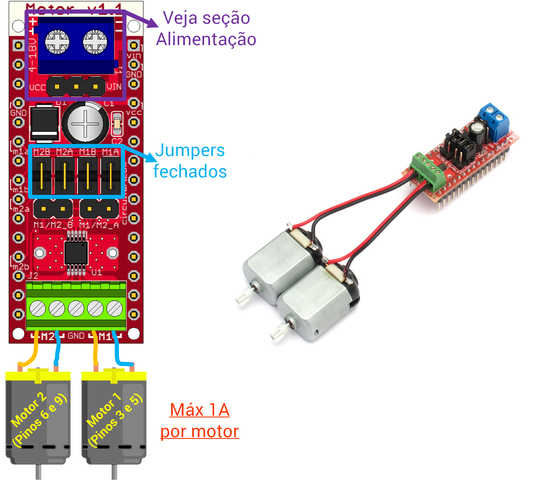
Para comandar 2 motores ao mesmo tempo, feche os jumpers da placa nomeados como M2B, M2A, M1B e M1A (veja figura abaixo).
Os motores são ligados ao módulo através do borne de parafuso verde. Os terminais nomeados como M1 indicam a ligação do motor 1 (controlado pelos pinos 3 e 5 do Arduino), e os terminais nomeados como M2 indicam a ligação do motor 2 (controlado pelos pinos 6 e 9 do Arduino). Há também um terminal de GND, que pode ser utilizado para ligação de capacitores ou outro tipo de filtro, caso seja necessário.
A figura abaixo ilustra quais jumpers devem ser fechados e como deve ser feita a ligação dos motores:
Ligação com 1 motor
Para comandar apenas 1 motor, feche os jumpres da placa nomeados como M1/M2_B e M1/M2_A (veja figura abaixo). Após isso, você pode escolher se o motor será comandado pelos pinos 3 e 5 ou 6 e 9 do Arduino.
A figura abaixo ilustra as duas ligações: à esquerda temos o motor controlado pelos pinos 3 e 5; à direita temos o motor controlado pelos pinos 6 e 9.

Passo 2: Escolhendo o modo de alimentação
Com o Nanoshield Motor, você tem várias possibilidades para configurar o modo com o qual os motores e o Arduino serão alimentados. As seções a seguir ilustram as possibilidades
Alimentando os motores e o Arduino através do pino VIN
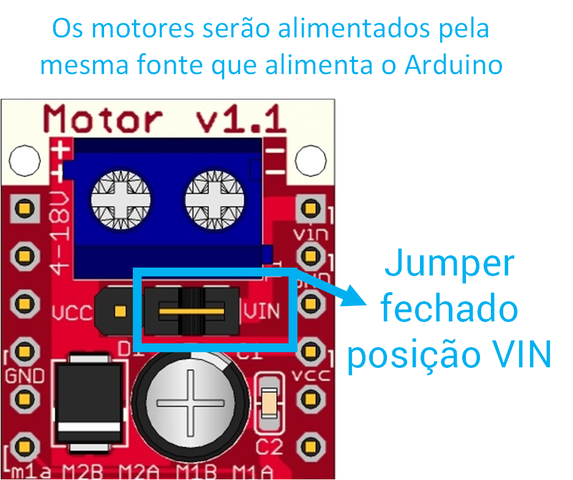
Essa configuração permite que tanto os dois motores quanto o Arduino sejam alimentados pela tensão aplicada ao pino VIN.
Para utilizar esse modo, feche o jumper localizado na parte superior da placa, na posição VIN (veja figura abaixo). A fonte de alimentação deve ser ligada ao Arduino ou à Base Board através da entrada para fonte externa, ou através do borne azul do Nanoshield Motor, observando as indicações de polaridade e .
A figura abaixo ilustra a alimentação com o pino VIN.
Alimentando os motores e o Arduino através do pino VCC
Essa configuração permite que tanto os dois motores quanto o Arduino sejam alimentados pela tensão aplicada ao pino VCC.
Para utilizar esse modo, feche o jumper localizado na parte superior da placa na posição VCC (veja figura abaixo). A fonte de alimentação deve ser ligada através do borne azul do Nanoshield Motor, observando as indicações de polaridade e .
Porém, é preciso se certificar de que a fonte (ou bateria) utilizada tem tensão entre 4 e 6V. Tensão menor do que 4V pode causar mau funcionamento (porém sem danificar as placas), e tensão maior do que 6V pode causar danos permanentes ao Arduino. Se a sua fonte (ou bateria) tiver mais do que 6V, utilize a opção "Alimentando os motores através do VIN do Arduino".
Alimentar pelo pino VCC é útil quando o projeto utiliza pilhas ou baterias, como por exemplo 4 pilhas alcalinas (1,5V) ou 4 pilhas recarregáveis de NiMh (1,2V) em série.
A figura abaixo ilustra a alimentação através do pino VCC.

Usando uma fonte externa independente para os motores
Essa configuração permite o uso de uma fonte que alimentará apenas os motores, ou seja, o Arduino deve ser alimentado por uma outra fonte, ou pela porta USB. Esse modo é útil quando você tem motores que exigem uma tensão mais elevada (entre 12 e 18V por exemplo), o que poderia ocasionar superaquecimento nos reguladores do Arduino.
Para utilizar uma fonte independente, abra o jumper localizado na parte superior da placa (veja figura abaixo). A fonte de alimentação para os motores deve ser ligada diretamente no borne azul do Nanoshield Motor, observando as indicações de polaridade e .
A figura abaixo ilustra a alimentação com fonte independente.

Passo 3: Ligação com Arduino
Utilizando Base Board ou BaseBoarduino
Se você já possui um Arduino, o jeito mais fácil de utilizar o Nanoshield Motor é usando a Base Board UNO ou Base Board L UNO, basta encaixar todas as placas e o conjunto já está pronto para usar. Esta montagem pode ser utilizada com o Arduino UNO, Mega R3, Duemilanove entre outras (entre em contato caso tenha dúvidas sobre compatibilidade com outras versões).
Outra opção é utilizando a BaseBoarduino. Da mesma forma, basta encaixar o Nanoshield em um dos slots, e o conjunto já está pronto para uso.
A figura abaixo mostra como fica a montagem do conjunto com a Base Board e com a Base Boarduino.

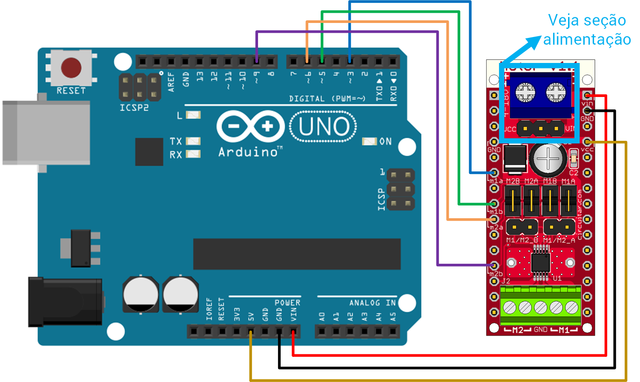
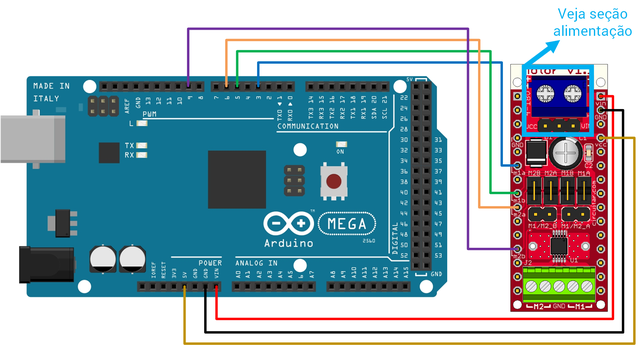
Conectando um Arduino utilizando jumper wires
Também é possível utilizar o módulo com montagem direta, utilizando um protoboard e jumper wires para fazer a conexão. Utilize os seguintes esquemas para conectar o Nanoshield ADC a um Arduino UNO ou Arduino Mega.
Passo 4: Controlando os motores
O controle dos motores é feito conforme mostram as tabelas a seguir. É possivel usar PWM para controlar a velocidade – por exemplo, usando analogWrite().
Motor 1
| Pino D3 | Pino D5 | Função |
|---|---|---|
| 0 | 0 | MOTOR DESLIGADO |
| 0 | 1 |  |
| 1 | 0 |  |
| 1 | 1 | FREIO |
Motor 2
| Pino D6 | Pino D9 | Função |
|---|---|---|
| 0 | 0 | MOTOR DESLIGADO |
| 0 | 1 | |
| 1 | 0 | |
| 1 | 1 | FREIO |
Acompanha:
1 – Nanoshield Motor
Produtos relacionados



{kind=link}
Eletroshields Eletronicos LTDA - CNPJ: 30.195.238/0001-80 © Todos os direitos reservados. 2026